Hip biomechanics and the control of posture
What controls these moments?
How do people compensate if their muscles are not strong enough to counter the moments produced by gravity?
How does an assistive device help an individual compensate for muscle weakness?
Students in Control of Human Movement 2 will learn how gravitational and muscle forces (not just moments) affect the hip joint surface (the interface between the femoral head and the acetabulum) during unilateral stance.
Gravity's effect on hip joint movement during standing
|
In normal standing posture, the center of gravity of the mass superincumbent to the hip joint is located so that its line of application passes posterior to the hip joint's lateral axis (Kendall, McCreary, & Provance, 1993, p.75).
| Gravity's force, acting at a distance from the axis of the hip joint, produces a posterior pelvic tilt. In a closed chain, with the femur relatively fixed, a posterior pelvic tilt produces hip extension.
What controls gravity's hip extensor moment?
hip flexor muscle activity?
|
|---|
| The idea that we activate muscles that oppose gravity's moment makes sense in terms of rotational equilibrium.
BUT
In this case, we need not use muscles to stabilize the hip joint during normal quiet standing, because an anterior ligament exists with the same line of application.
|
|---|
When the iliofemoral ligament elongates, like a very tight spring, it develops an elastic force. Although this force is passive, not active like a muscle's force, it is nevertheless directed at its points of attachment on the ilium and femur. The force prevents the attachments from being pulled further apart, that is, it prevents extension. A vector that represents this ligamentous force looks exactly like the one that depicts the force developed in a hip flexor muscle.
|
|---|
|
|---|
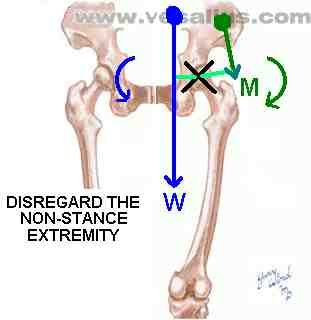
Gravity's effect on hip joint movement unilateral stance (frontal plane)
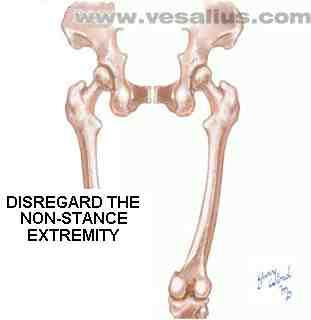
| This figure provides a posterior view of the pelvis, the view a therapist (with radiovision!) might have of a person as he or she walks and bears weight momentarily on the right lower limb.
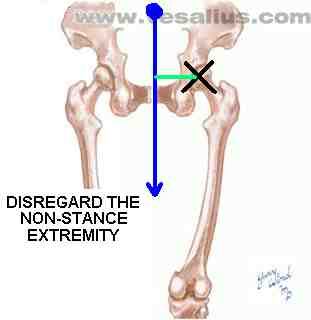
| Because the stance phase of walking occurs in a closed kinetic chain, we analyze right (stance) hip movement by considering the mass superincumbent to the joint as the moving part.
| By placing the gravity vector on the approximate center of gravity of the moving part, we determine that its force, the weight of the mass superincumbent to the hip joint, produces adduction of the right hip.
|
|---|
|
|---|
|
|---|
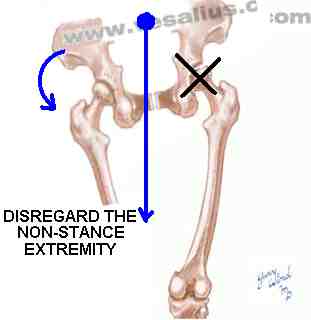
What controls gravity's adductor moment?
| When people walk, their pelvises don't drop dramatically on the non-stance side because gravity's adductor moment is balanced by an equal and opposite abductor moment. "A major function of the hip abductors is in closed-chain motion to maintain a level pelvis in unilateral stance" (Smith, Weiss, & Lehmkuhl, 1996, p.294)
|
|---|
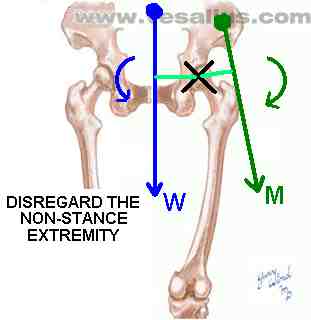
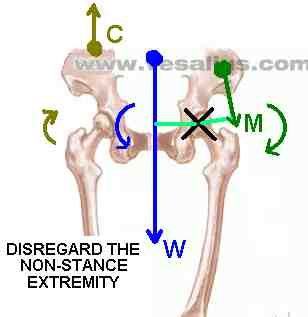
Compensation for muscle weakness
Because hip abductor activity is necessary to stabilize the hip in the frontal plane during unilateral stance, including the stance phase of walking, people with hip abductor weakness (note the relatively short vector M in the figure below) have a problem.
| We might see the pelvis drop on the unsupported side if we ask a person to stand briefly on the limb whose hip abductors are weak. The, inability to maintain a level pelvis in unilateral stance is called a positive Trendelenburg sign.
|
|---|
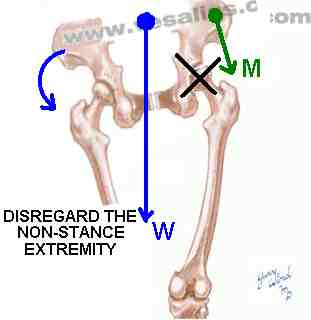
Because permitting the pelvis to drop on the unsupported side when one walks is to risk a fall, few people do it. Instead, most people try to achieve rotation equilibrium
Fgsg=Fmsm
by decreasing sg, the moment arm associated with gravity's force on the mass superincumbent to the hip joint. Decreasing sg, or shortening the gravitational force's moment arm, also decreases the magnitude of gravity's adductor moment, and so decreases the force demanded of the weak muscle.
| The most direct way to reorient the line of application of the gravity vector (note how vector W has shifted to the right), and so to shorten its moment arm with respect to the hip joint, is to lean the trunk toward the side of the hip whose abductor muscles are weak. This characteristic way of walking, in which the person leans laterally during stance, is sometimes called a Trendelenburg gait pattern or a gluteus medius limp.
|
|---|
Students in Control of Human Movement 2 will learn more about the biomechanics of lateral trunk lean and other common gait deviations.
How an assistive device helps people control the pelvis without developing large forces in the abductor muscles
The secret in using an assistive device, like a cane, is to create an additional force that keeps the pelvis level in the face of gravity's tendency to adduct the hip during unilateral stance. The cane's force must substitute for the hip abductors.
| A force that levels the pelvis efficiently, because its moment arm is relatively long, is directed upward from a point of appliation on the pelvis (vector C). The force originates on the side opposite the hip whose abductor muscles (vector M) are weak .
|
|---|
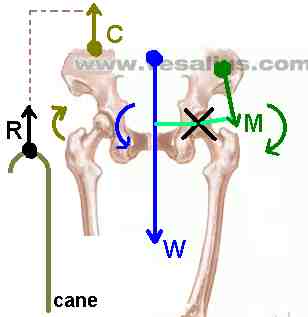
| To produce a force like vector C with a cane, one must push the cane firmly into the ground in a vertical direction. Doing so generates an upward reaction force (vector R) whose magnitude equals the downward force one exerts on the cane.
Additionally, the person needs adequate strength in the muscles of the wrist, elbow, shoulder girdle, and trunk, whose effect is symbolized by the dashed line that connects vectors R and C. If not, he or she cannot efficiently transfer the cane's vertical reaction force (vector R) to the top of the pelvis (vector C) where it is needed.
|
|---|